
\n\tThe Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide book by David J. Perdue with Laurens Valk comes with four more cool projects to add on to the ones that come with the LEGO Mindstorms NXT 2.0 set. This gallery features photos of the book’s four programmable robot models.
\n
\n\tThe Inventor-Bot is a basic track-driven vehicle that is capable of supporting various peripherals, which allow it to perform myriad functions. The next several slides highlight some of those functions.
\n
\n\tPhoto of Laurens Valk’s model by Wally Bahny for TechRepublic
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.

\n\tThe first peripheral for the Inventor-Bot is the ultrasonic sensor; it allows the bot to \u201csee\u201d and react to an object directly in front of it. Two variations on this are to turn and avoid an object and to keep a consistent distance from a moving object.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.

\n\tA logical add-on to the Inventor-Bot is a feature to shoot the little colored balls at an intruder. This image shows the ball clip added on to the Inventor-Bot.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.

\n\tThe next add-on are antennae to help the Inventor-Bot \u201cfeel\u201d the edges of a table and then react by turning and heading in a different direction. These work by activating touch sensors when the antennae drop down about \u00bd inch over the edge of the table.
\n
\n\tThe book’s robot builder, Laurens Valk, provides a couple of variations on the programming of this robot to help it handle hitting the corner of the table exactly, as well as displaying left and right activation counts on the LCD screen.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.

\n\tThe Jeep robot is a front-wheel drive vehicle that has independent motors to power each wheel, as well as a third motor to handle steering. The motors are programmed so that when the steering motor changes its rotation angle, the left and right drive motors speed up and slow down appropriately to balance out the turn.
\n
\n\tThe Jeep robot can also avoid walls and other obstacles using the ultrasonic sensor.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.
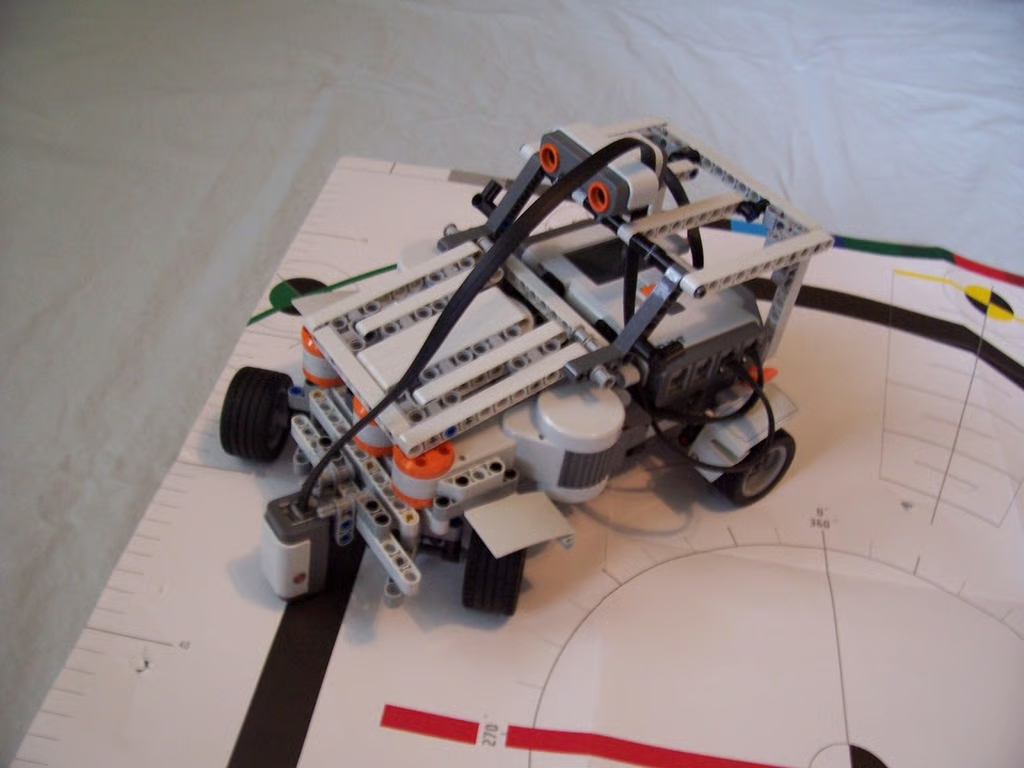
\n\tYou can add the color sensor to make the Jeep robot follow a black line. This is accomplished by turning the wheels slightly in either direction until the color sensor finds the edge of the black line and then, following the edge, making small adjustments as necessary to the turning angle.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.

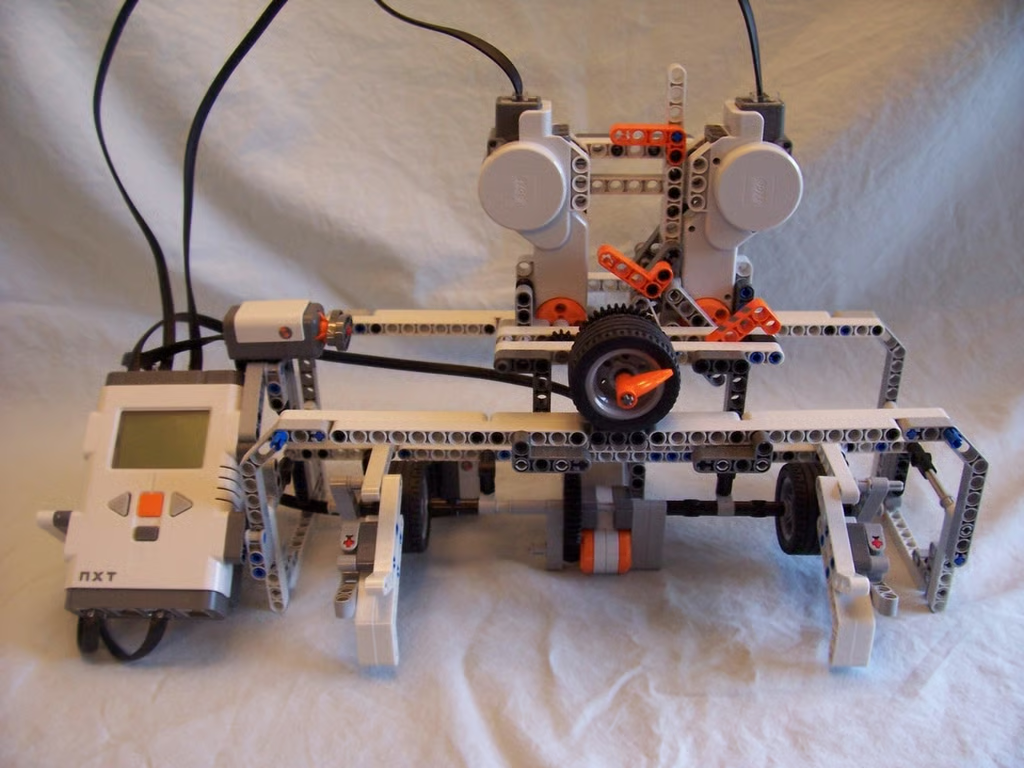
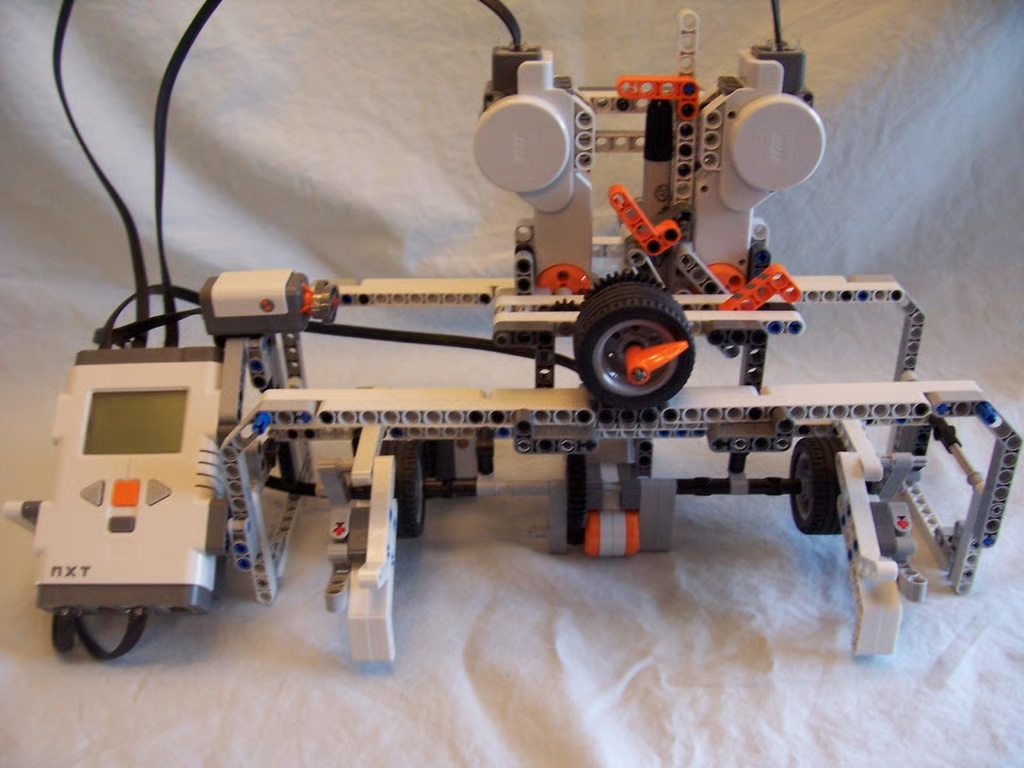
\n\tThe Lizard robot model walks on four legs using a complex array of beam blocks on either side to control movement. Two independent drive motors are used, one on either side.
\n
\n\tThe Lizard robot is capable of recognizing \u201cStay\u201d (yellow ball), \u201cWalk\u201d (blue ball), \u201cFood\u201d (green ball), and \u201cDanger\u201d (red ball). It can also can react to walls and objects, causing it to turn and head in a different direction. In the book, Laurens Valk explains how to use the NXT buttons as an override, enabling the changing of balls without triggering the ultrasonic sensor.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.
\n\tThe Printer robot is a fully functioning ink and paper printer that uses a pen or marker to draw on a sheet of paper. Three motors are used in the drawing. The first motor raises and lowers the pen to the paper. The second motor moves the carriage left and right along the track. The third motor moves the paper in and out of the printer. The second motor draws horizontal lines, the third motor draws vertical lines, and the two motors work in tandem to draw diagonal lines. This enables the creation of virtually any line-based drawing, including text.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.
\n\tThis photo shows the pen inserted into the Printer robot’s carriage. The orange L-shaped piece at the top is used to hold the pen firmly to the paper; it can be moved and adjusted in order to fit virtually any pen length. Also in the back (not shown) are two bushed friction pegs (I’m using the author’s naming scheme) that work with the rubber band-driven clamping mechanism to hold the pen and keep it from moving side-to-side inside the carriage.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.
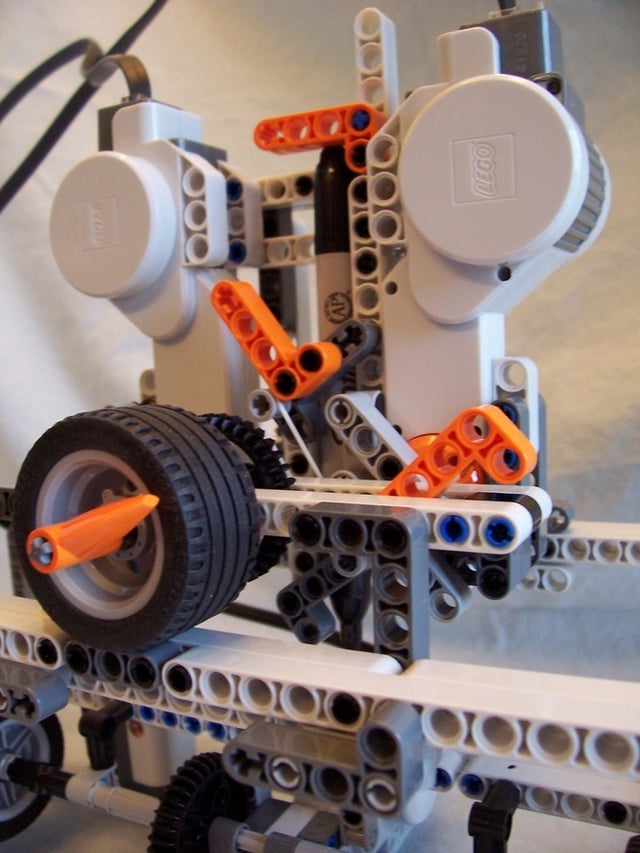
\n\tThis is another shot of the Printer robot’s carriage up close with the pen inserted. You can see the rubber band behind the wheel. The wheel, along with pieces that slide above and below the railings of the printer, enable the carriage’s movement.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.
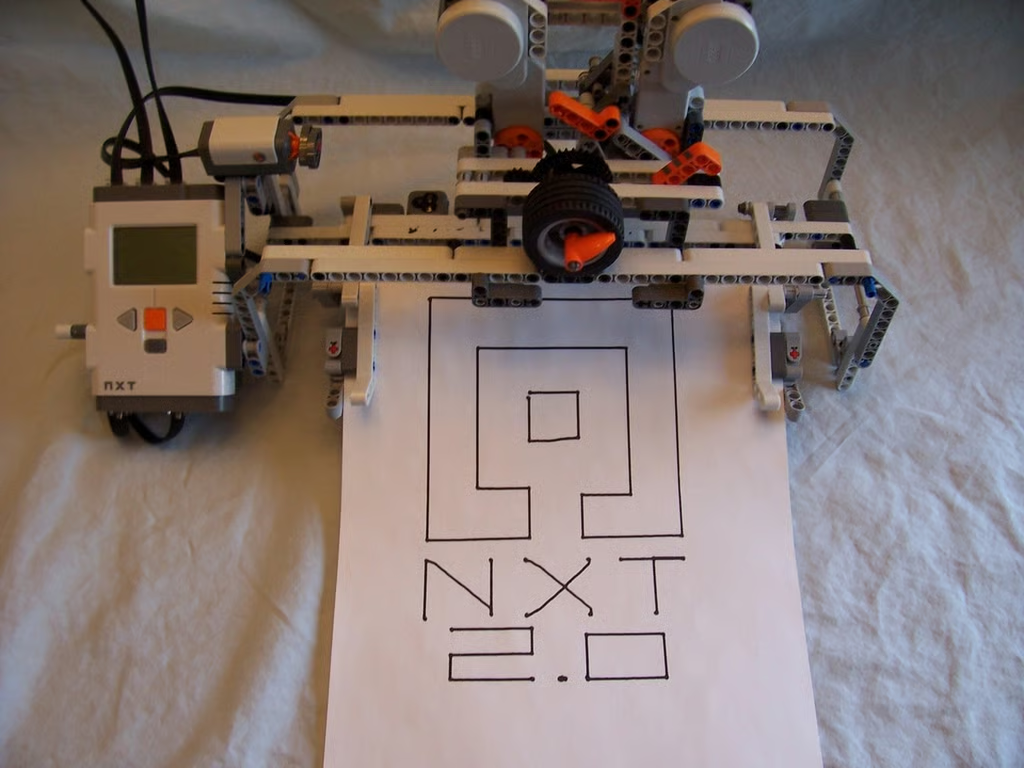
\n\tThe sample printout from the Printer robot is the Mindstorms logo with NXT 2.0 printed below it. Due to the inability of the rubber band clamp structure and the friction pegs to hold the pen completely secure, the size and shape of some aspects of the drawing are a little bit skewed. Using more pieces, it may be possible to tighten that grip on the pen and improve the quality of the drawing.
\n
\n\tFor the purposes of this book review, I did not alter any models except where allowed in the plans to accommodate U.S. letter format paper (vs. A4 format) and to adjust the L-shaped pen support piece mentioned earlier.
\n
\n
\n\tFor more about the book, read my Geekend post Geek Gifts 2011: The Unofficial LEGO Mindstorms NXT 2.0 Inventor’s Guide.












