
When three of the six nuclear reactors in Fukushima melted down in 2011 Japan deployed robots to help contain the disaster.
But while various remote-controlled and autonomous machines were able to operate in the irradiated area, the ability of drones to help was limited by the debris blocking access to areas near the reactor cores.
The Swiss firm Flyability’s answer is Gimball, a drone that can happily bash into walls and debris and carry on flying.
Gimball is surrounded by a spherical cage that protects it from knocks and bumps that would fell other drones.
The machine is designed to operate in the aftermath of disasters and emergencies, such as earthquakes and fires, where there may be hazards the drone could collide with or a confined space to work in.
Gimball’s ability to navigate these cramped environments comes from being able to remain stable after collisions and to roll along surfaces, in addition to flying.
Its on-board optical and thermal imaging equipment allows it to identify victims through smoke, as well as to gather information during an incident, for example by reading the labels on a chemical container.
The team’s fully-working prototype won the Drones for Good contest, and received the $1m grant.

While more than 100,000 lives are saved each year by organ transplants safely delivering the organs is a risky business.
Organs can only survive outside the body for a very limited period, so transportation by land or air is a race against time, all the while trying to minimise damage suffered en-route.
A group in Spain are proposing drones could provide the most efficient and safest way of getting organs where they are needed.
Their proposal is to use an unmanned aerial vehicle to transport organs inside a fridge, which would be carried from the donor to the recipient.
They are planning to use a quadcopter that is able to plot its course to the hospital where the transplant will take place. To extend the flying time of the drone they intend to use polymer solar cells to recharge some of its battery while airborne.
A model of the refrigerated unit the Dronlife drone would carry organs in.

By some estimates half of the world’s rainforests have been destroyed.
Worldwide we are unable to replace trees lost to lumber, mining, and agriculture and urban expansion fast enough to keep up with deforestation.
UK firm BioCarbon Engineering hopes to counter this loss by planting at least one billion trees a year.
Rather than using existing manual methods for planing trees – which it says are slow, labour intensive and expensive – it plans to use drones to fire seeds into the ground.
Unmanned quadcopters would shoot bioplastic seed pods filled with a germinated seed and nutrients at pre-mapped points. It estimates that two drone operators could remotely plant about 36,000 trees each day at less than 10 percent of the current cost. By using 50 operational teams it believes it could hit its goal of planting one billion trees.
It hopes the low-cost and speed of the system will appeal to organisations that are trying to restore areas destroyed by natural disasters and those required to repopulate an area denuded by commercial operations, such as mining.
3D maps of the planting area generated by the drones would also be combined with other environmental data to identify which species of trees should be planted to generate the highest yield.
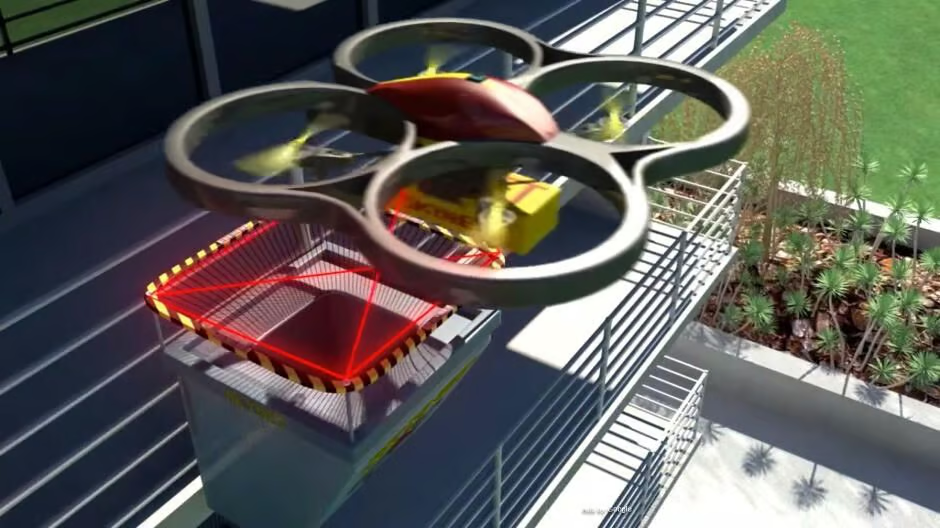
In this instance Skynet isn’t an AI hell-bent on wiping out mankind but rather a system to enable delivery by drone.
The aim of Skynet is to allow drones to safely deliver goods to the correct property.
The Skynet system would rely on a container attached to the side of a building. A drone would use GPS to carry goods to the property. Once at the premises, the Skynet container would have several features designed to minimise the risk of the drone missing the container or dropping off goods in the wrong place. On top of each container would be a frame with a barcode on each side to identify it, as well as indicators in each corner to allow the drone to precisely position itself before releasing the goods. The drone would use onboard sensors to read the barcode and measure the angle of the indicators relative to itself.
A net would be fixed around the gap at the top of the container to cushion the fall for the goods after they were released.

Nick Heath is a computer science student and was formerly a journalist at TechRepublic and ZDNet.





