
Remote controlling a robot almost 250 miles below you while hurtling through space at just under 18,000mph is no simple feat.
But while guiding a bot from orbit is difficult, on Tuesday European astronaut Andreas Mogensen demonstrated it’s not impossible.
From his vantage point on board the International Space Station (ISS), the European Space Agency (ESA) crew member successfully controlled a robotic rover at the European Space Research and Technology Centre (ESTEC) in the Netherlands.

Mogensen’s challenge was relatively simple. Drive to a board, pick up a peg and insert it into a hole.
The task wasn’t as straightforward as it sounds – the peg needed to be pushed four centimeters in to make an electrical connection and there was less than one sixth of a millimetre’s clearance around the peg.
To help manage this task Andreas used a force-feedback control system developed at ESA, letting him feel for himself whenever the rover’s flexible arm met resistance.

The real test was giving Mogensen a meaningful sense of force feedback despite the almost 90,000 miles that signals had to travel between the ISS and the rover on the ground.
The round trip took the signals from the station, circling Earth at nearly 18,000mph, up to satellites almost 36,000km high and then down to a US ground station in New Mexico, via NASA Houston and then through a transatlantic cable to ESTEC – and back.
The resulting two-way time delay between signals being transmitted and received is close to one second. To prevent Mogensen and the robot arm from going out of sync, the ESA team developed software to compensate for the lag.

The 4×4 wheeled vehicle combines a camera head on a neck system, a pair of highly advanced arms designed for remote force-feedback operation and a number of proximity and location sensors, including an arm laser to measure depth close-up.

The view through the bot’s camera head, seen here, was streamed back to Mogensen on the space station.
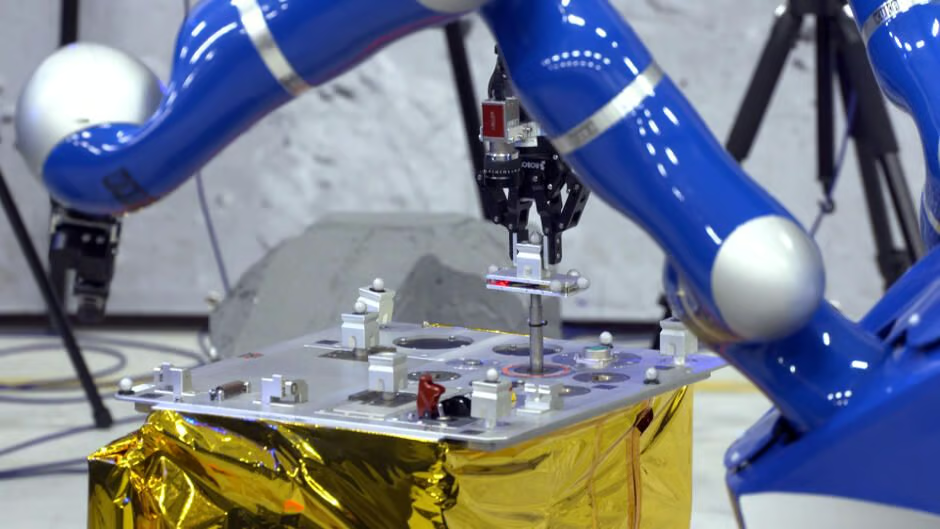
Mognesen guides the robotic arm to put the peg inside the hole.
“We are very happy with today’s results,” said Andr\u00e9 Schiele, leading the experiment and ESA’s Telerobotics and Haptics Laboratory.
“Andreas managed two complete drive, approach, park and peg-in-hole insertions, demonstrating precision force-feedback from orbit for the very first time in the history of spaceflight.
“He had never operated the rover before but its controls turned out to be very intuitive,” he said, adding it took Mogensen 45 minutes to reach the board and insert the pin on his first attempt and less than 10 minutes on his second.

Mogensen arrived at the International Space Station on the 2nd of September, after a two-day flight on board the Soyuz TMA-18M spacecraft, seen here taking off from Kazakhstan in Central Asia.
ESA said the robotic experiment is the first step towards developing robots that would allow operators to remotely control rovers on planet surfaces. Future uses could include guiding robots to build a base on the surface of the Moon or astronauts orbiting Mars driving rovers on the planet below – it suggests. The remote-control process could also be used in reverse, with people on Earth controlling a craft that removes debris from orbit.

Nick Heath is a computer science student and was formerly a journalist at TechRepublic and ZDNet.







