
An exhibition illustrating the application of artificial intelligence in robots was featured as part of the jointly held 2006 National Conference on Artificial Intelligence and the 2006 Conference on Innovative Applications of Artificial Intelligence. The conference takes place this week in Boston.
\r\n\r\n
For example, the Bryn Mawr Pyro Robotics team, led by Douglas Blank, brought an Aibo robot with a SEED program and a baby gym to illustrate the artificial intelligence concept of self-teaching as a way to develop human-level intelligence in robots. If put in a stimulating environment and told to choose an action that will garner more information about itself, this robot will explore its world and learn, Blank said.

TARO: A Semi-Autonomous Interactive Robot was brought by a team from the College of New Jersey. Its purpose is natural-language understanding and execution. Entered in the human/robot interaction contest, TARO is capable of talking, animating its “face” as it speaks, shaking hands and responding to questions.

HOBOS, or the Highly Organized Bunch of Scavengers, from the University of California, Los Angeles, are intended for eventual use as a team for search-and-rescue operations, and for assistance to the elderly. The robots use a combination of localization, dynamic path planning, peer-to-peer communication, and object-recognition processing modeled after the visual cortex.
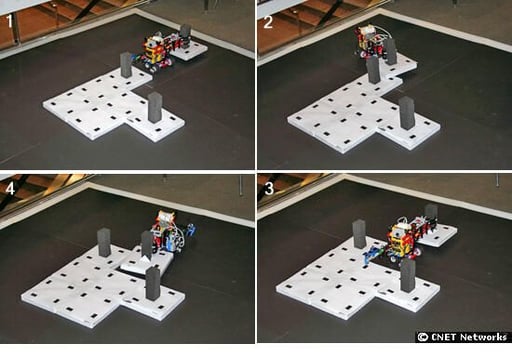
Harvard University’s Collective Construction Lego Robots operate collectively, but independently of one another to build structures. There is no centralized control, but a family of algorithms that the robots follow. The team’s eventual goal is to give the robots a blueprint and then walk away, team member Matthew Valente said. The robots could have uses in areas where humans can’t go, such as deep underwater or in contaminated areas, said Radhika Nagpal, another team member. Think of them as social insects without a queen bee, she said.

The Drexel Integrated ATV System team showcased a remote-control helicopter and an all-terrain vehicle that work in tandem. Intended for search and rescue, and for military operations, the helicopter is an aerial spotter than can identify people or items associated with people. Once it finds someone, it transmits GPS points to the ATV. The ATV then navigates to the individual in need of rescue or transport. With a flip of the switch, the robot’s self-navigation can be turned off to allow the people to drive themselves out of the area.

Kevin Yoon (left) and Jeremy Stolarz of Carnegie Mellon tweak their unresponsive CMAssist, a RoboCup 2006 participant intended to provide assistance in the home.
\r\n\r\n”Why are computers such pains?” Stolarz complained.
\r\n\r\n”I don’t know. You should give a talk on that,” quipped Yoon.
\r\n\r\nThe goal of the CMAssist RoboCup@Home team is to develop a robot that can recognize complex human tasks from observation, analyze the task and then learn how to complete the task.

CMAssist team member Jeremy Stolarz is happy to finally take his home assistance robot for a walk.
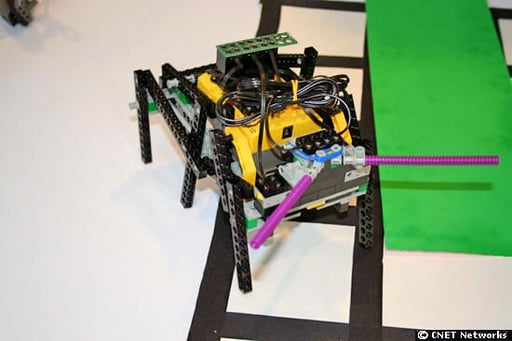
This one is from a group of robots developed by team Snarpy from Canisius College and Hamiltion College that run SNePs, a powerful knowledge and representation reasoning method, and Pyro (Python Robotics).
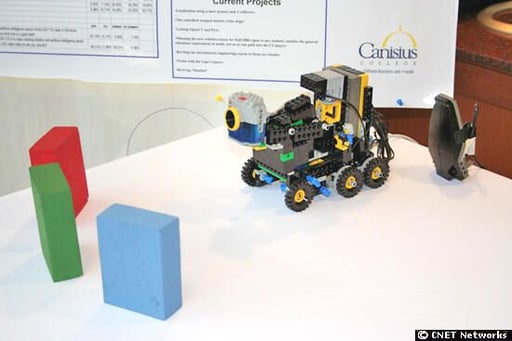
A Lego Mindstorms classic robot developed by Camille Moreno of the Snarpy teams seeks out red objects. “The new Lego Mindstorms NXT system, which will have four sensors, will allow students to do more,” said Moreno. \r\n
\r\nShe and her teammates said they were restricted by what they could find to work with in their price range. The Lego Mindstorms NXT kit is due out in August.

The Idaho National Laboratory (IDNL) Robot and Human Systems Group brought the Robot Mini, a new artificial intelligence interface, which can handle active objects that get in a robot’s way as it moves. The robot also builds a map as it navigates. Instead of manipulating the robot’s movement, people instruct the robot on where to go by choosing a point on the map. The robot then gets there on its own. \r\n
\r\nThe technology is currently being tested on PAKbot UGVs (Unmanned Ground Vehicles) used in Iraq for Explosive Ordnance Disposal (EOD), said Curtis Nielsen of IDNL.

Tulane University students Matthew Dooner, Malcolm Hutson, and Harold Bufford used Sony Aibo robots as interfaces for artificial intelligence. “Cassandra” (upper left corner) uses AIML (Artificial Intelligence Markup Language) and a text-based interface to answer questions on 65,000 categories by assessing keywords. Cassandra explores what it takes to model emotions in a robot. \r\n
\r\nTalking about the weather generates pleasant natural-language responses, while choice curse words garner a distressed response like: “Why are you being rude to me?” \r\n
\r\n”Woofie” (center) is used to teach speech and language impaired preschoolers in New Orleans vocabulary, sequence and memory skills. Woofie makes an animal noise, says the name of the animal, and then asks children to step on the corresponding square. The robot dog responds positively when the answer is correct, and continues the game, adding an additional animal to the list upon each turn.

Alexander Rozier, age 11, programmed two Lego Mindstorms robots to play soccer via RoboLab, a graphical programming language developed by Tufts University. The robots were part of the Junior Division of RoboCup that was held in June in Germany. A total of 1,500 students comprising 260 junior teams from 22 countries participated. \r\n
\r\nThe junior-level contest offers the same three challenges every year–soccer, rescue and dance–so that children can build on their robotics experience from one year to the next, said Elizabeth Sklar, a founding chair of RoboCup and Rozier’s mother. \r\n
\r\nSklar runs a program out of New York City’s Brooklyn College in which undergraduates work with teachers in elementary and middle schools to integrate robotics into math and science curriculum for their students. “Now students who have been participating are going off to college…and majoring in engineering and computer science,” Sklar said.

Bryn Mawr College’s team, Pyro Robotics, entered Bubbles, an autonomous blimp robot made of two Mylar dodecahedrons containing three cameras in its gondola for vision. Bubbles was entered into a scavenger hunt for robots. According to Zachary Dodds, a scavenger hunt co-chair for the conference, the robots are tested for knowledge of spatial surroundings and their ability to identify objects using vision or other types of sensors.
\r\n \r\n”We are less worried about the hardware and more interested in sophistication. It’s all about reasoning about the world. The robots will be trying to figure out where they are and find objects located around the conference center. One of them will be my daughter’s Winnie-the-Pooh doll,” Dodds said.

A “frustrated” PatrolBot AGV from MobileRobots stood outside of an elevator as the doors closed and people went down without him. “If outfitted with a card reader; I could take this elevator,” it repeated over and over to amused bystanders. Its owner later confessed that a human programming error had contributed to the malfunction.

Rowan University’s IMAPS team created a robot for use in tracking specific water pollutants to the originating source. The artificial intelligence used to detect and follow the flow of pollutant concentrations in water is modeled after the way a blue crab tracks its prey.
Bill Detwiler is the Editor for Technical Content and Ecosystem at Celonis. He is the former Editor in Chief of TechRepublic and previous host of TechRepublic's Dynamic Developer podcast and Cracking Open, CNET and TechRepublic's popular online show. Previously, Bill was an IT manager in the social research and energy industries. He has bachelor's and master's degrees from the University of Louisville, where he has also lectured on computer crime and crime prevention.














