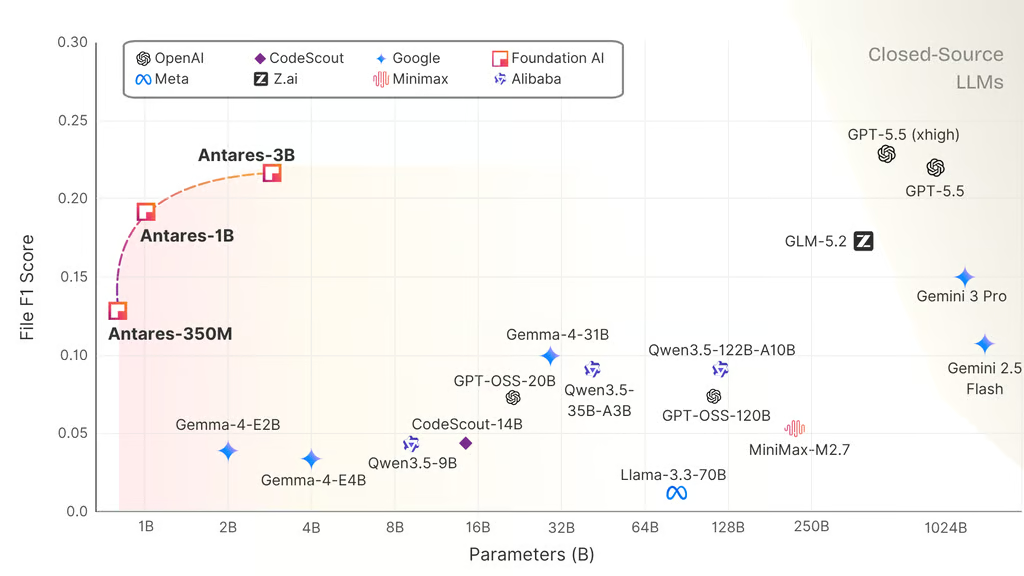
Cisco’s new Antares models help security teams narrow vulnerable code searches locally, but low benchmark scores expose important adoption limits.